



Posicionador de giro horizontal de três eixos / Posicionador para robô de soldagem
Parâmetros técnicos
| Posicionador servo triaxial de rotação vertical | Posicionador servo triaxial rotativo horizontal | ||||||
| Número de série | PROJETOS | Parâmetro | Parâmetro | OBSERVAÇÕES | Parâmetro | Parâmetro | OBSERVAÇÕES |
| 1 | Carga nominal | 500 kg | 1000 kg | Dentro de um raio de R400 mm do segundo eixo | 500 kg | 1000 kg | Dentro de um raio de R400mm/R500mm do segundo eixo |
| 2 | Raio de giração padrão do fuso | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Raio de giração padrão do contraeixo | R400mm | R500mm | R400mm | R500mm | ||
| 4 | Ângulo de inversão do primeiro eixo | ±180° | ±180° | ±180° | ±180° | ||
| 5 | ângulo de rotação do segundo eixo | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Velocidade nominal de subida do primeiro eixo | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | Velocidade de rotação nominal do segundo eixo | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | Precisão de posicionamento repetido | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Dimensão limite do quadro de deslocamento (comprimento×largura×altura) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Dimensões gerais do seletor de posição (comprimento × largura × altura) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Altura central da rotação do primeiro eixo | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Condições de fornecimento de energia | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Com transformador de isolamento | |
| 13 | Classe de isolamento | H | H | H | H | ||
| 14 | Peso líquido do equipamento | Aproximadamente 1800 kg | Aproximadamente 3000 kg | Aproximadamente 2000 kg | Aproximadamente 2000 kg | ||
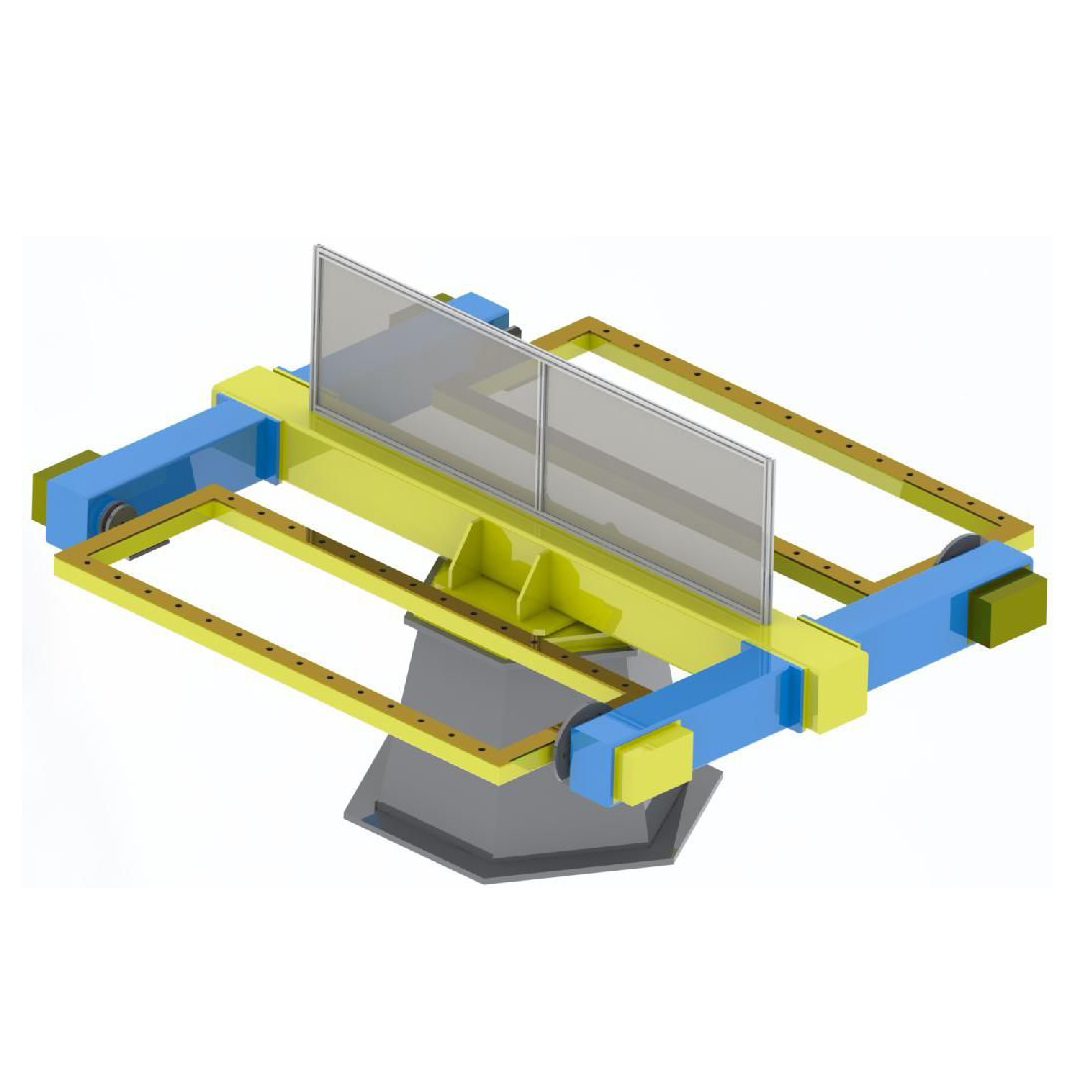
Posicionador servo triaxial rotativo horizontal

Posicionador servo triaxial de rotação vertical
Introdução à estrutura
O posicionador servo vertical triaxial de rotação é composto principalmente por uma estrutura integral soldada, uma estrutura de deslocamento de rotação, um servomotor CA e um redutor de precisão RV, um suporte rotativo, um mecanismo condutor, uma blindagem protetora e um sistema de controle elétrico.
A estrutura integral soldada é fabricada com perfis de alta qualidade. Após recozimento e alívio de tensões, ela passa por usinagem profissional para garantir alta precisão de usinagem e exatidão em posições-chave. A superfície recebe uma pintura anticorrosiva, que confere um aspecto bonito e elegante, e a cor pode ser personalizada de acordo com as necessidades do cliente.
A estrutura de deslocamento rotativo deve ser soldada com aço perfilado de alta qualidade e processada por usinagem profissional. A superfície deve ser usinada com furos roscados padrão para montagem de ferramentas de posicionamento, e deve ser realizado tratamento de pintura, oxidação negra e prevenção de ferrugem.
O servomotor CA com redutor RV foi selecionado como mecanismo de potência, o que garante a estabilidade da rotação, a precisão do posicionamento e
Longa durabilidade e baixa taxa de falhas. O mecanismo condutor é feito de latão, que possui excelente condutividade. A base condutora adota isolamento integral, protegendo eficazmente o servomotor, o robô e a fonte de alimentação de soldagem.
O sistema de controle elétrico adota um PLC Omron japonês para controlar o posicionador, com desempenho estável e baixa taxa de falhas. Os componentes elétricos são selecionados de marcas renomadas nacionais e internacionais para garantir a qualidade e a estabilidade de uso.
A proteção contra a luz é montada com perfil de alumínio e placa de alumínio-plástico para proteger contra a luz do arco elétrico gerada durante a soldagem e o corte.








